Multivariate-Time-Series-Imputation-with-Generative-Adversaria-Networks
一篇来自 NIPS’18 的关于数据补全的work,文章链接 Link
background
将缺失数据处理分为三类, 确切来说,直接删除残缺、线性/插0补全、机器学习方法。然而将这些方法不能很好的考虑两个observation间的时序关系
method
- 传统的GAN存在训练困难的问题,因此这里采用了WGAN
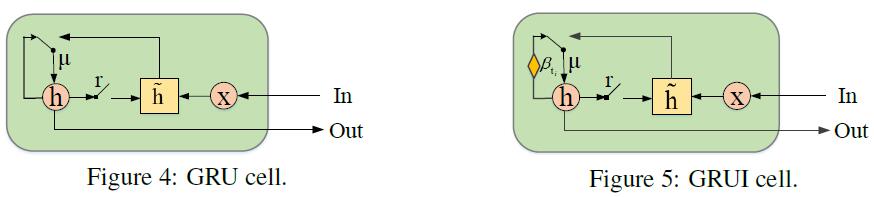
- 传统的RNN变种对于残缺数据这种,存在两个观测值差距较远的情况不适用。因此设计了新的 Gated Recurrent Unit for data Imputation (GRUI)
Defination
对于一个时序,具有两个维度:时间 $\textbf{T} = (t_{0}, t_{1},…,t_{n-1})$, 每个时间点上的特征维度$d$。所以时序观测值$\textbf{X} = (x_{t_{0}},…,x_{t_{i}},…,x_{t_{n-1}})$.
定义mask matrix $\textbf{M} \in {\mathbb{R}^{n \times d}}$ 来表示当前$\textbf{X}$的残缺情况,$M^{j}_{t_{i}} = 1$则表示$X^{j}_{t_{i}}$存在.
定义 time lag matrix $\delta \in {\mathbb{R}^{n \times d}}$来记录当前值和最后有效值的距离.
定义 time decay vector $\beta$ 来控制过去观测值的影响,$\beta \in (0, 1]$,${\delta}$的值越大,对应的$\beta$越小
GRUI
与GRU相似:
GAN
D: 首先是 GRUI,然后跟着 Linear和dropout;
在输入原始不完全时序特征时到D时,$\delta$的每一行内不相同;而在输入至G时,每一行内相同。
G:也是由GRUI和Linear构成。
定义了两个Loss
masked reconstruction loss. 表示$G(z)$应该和原始残缺$x$足够接近
discriminative loss.表示令$G(z)$尽可能真实.
最终,loss function可以表示为
$\lambda$为超参。
对于原始时序特征x,我们从高斯分布中降采样一个 z,并放入G得到G(z)。在训练至收敛后,我们将$x$的残缺值替换为下式
Experiement
在一个医疗数据集和一个空气质量数据集进行实验。
结果看起来还行.
Idea
看起来只是将GAN和GRU修改之后变得适用于imputation 这个task,
亮点:
- 整个结构设置的比较合理
- 从mask matrix的角度生成合适的G(z)
- GRUI也相较于普通的GRU更实用.
- 整个GAN框架为之后基于GAN进行imputation提供了基础
不足:
- 背景故事不太有说服力,为什么那些传统的model不太work
- WGAN和GNA的区别性在method中并没有提出太多
Multivariate-Time-Series-Imputation-with-Generative-Adversaria-Networks

